Change Language :
Präzise, spielfreie Gleit- und Linearlager für Assistenzroboter in der Chirurgie
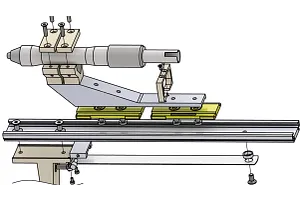
Für eine absolut spielfreie Lagerungen wurden u.a. drylin-Gleitschienen verbaut
Dieses System, entwickelt am Institut für Mechatronische Systeme der Leibniz Universität Hannover, assistiert Ärzten bei der minimalinvasiven Cochleaimplantat-Chirurgie zur Behandlung von Innenohrtaubheit und hochgradiger Schwerhörigkeit. Die Technik erfordert eine Stichkanalbohrung, die bis zu 35 mm unterhalb der Schädeldecke liegen kann und in unmittelbarer Nähe von schützenswerten anatomischen Strukturen verläuft. Deshalb muss das System zum einen sehr präzise arbeiten und zum anderen medizinisch-hygienischen Anforderungen wie Dampfsterilisation genügen. Die chirurgische Instrumentenführung umfasst heute unter anderem eine drylin N-Gleitschiene mit zwei Schlitten. Zudem kommen mehrere iglidur X-Gleitlager zum Einsatz, die sich durch ihre Schmiermittelfreiheit hervorragend für den Einsatz in medizinischen Anwendungen eignen.

Eingesetzte Produkte

Beratung
Gerne beantworte ich Ihre Fragen auch persönlich

Beratung und Lieferung
Persönlich
Montag bis Freitag: 8–20 Uhr
Samstag: 8–12 Uhr
Online
Chat-Service
Montag bis Freitag: 8–16 Uhr (CET/ CEST)
WhatsApp-Service
Montag bis Freitag: 8–16 Uhr (CET/ CEST)