Bildungsroboter - HTBLuVA Salzburg
Was wurde benötigt:
Einfach anzusteuernder Roboterarm
Anforderungen:
Kostengünstig, modular, Präzision im 0,1 mm Bereich
Material:
robolink RL-DC-5
Branche:
Education / Bildungsbranche
Erfolg für den Kunden:
Günstiger Roboterarm, der sich leicht in ein bestehendes Gesamtkonzept mit Fremdsteuerung einbinden lässt
Einfach anzusteuernder Roboterarm
Anforderungen:
Kostengünstig, modular, Präzision im 0,1 mm Bereich
Material:
robolink RL-DC-5
Branche:
Education / Bildungsbranche
Erfolg für den Kunden:
Günstiger Roboterarm, der sich leicht in ein bestehendes Gesamtkonzept mit Fremdsteuerung einbinden lässt

Zur Anwendung
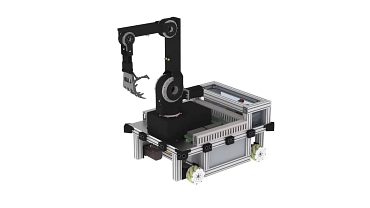
Die HTBLuVA Salzburg entwickelte diese Mensch-Roboter-Kooperation mit einer Gesten-/Mimiksteuerung im Rahmen eines Bildungsprojekts. Durch den Einsatz des AGV in Kombination mit dem Roboterarm samt "Fingergreifern" wurde ein vielfältig einsetzbarer Roboter geschaffen.Das Problem
Für Projekte dieser Art werden besonders günstige Komponenten benötigt, die jedoch eine möglichst hohe Interoperabilität aufweisen, damit diverse Baugruppen interagieren können.Hier musste sowohl der AGV für die Bewegung im Raum, als auch der Roboterarm samt Greiferhand über den haptischen Handschuh gesteuert werden können.
Die Lösung
Ein kostengünstiger robolink DC (5-Achs Modell) samt B&R Motosteuerungstechnik, in Kombination mit einem AGV, einer Greifereinheit und einem Handschuh, welcher haptisches Feedback zurückgibt.
Der robolink Konfiguartor
Entdecken Sie unseren Online-Konfigurator
Mit unseren intuitiven Online-Konfiguratoren können Sie Ihren eigenen robolink Gelenkarmroboter mit wenigen Klicks erstellen. Schnell, individuell und mit Fixpreis.Entdecken Sie jetzt die grenzenlose Freiheit mit unseren Tools.
Zum Konfigurator
Low Cost Automation Live erleben
Kostenfrei im Video-Call mit unseren Experten sprechen
Kostenlose Live-Demo durch unseren Experten.
Lernen Sie die Welt der igus Roboter und die dazugehörige Software igus Robot Control kennen.
Sehen Sie selbst, wie spielend leicht der Roboter programmiert werden kann.
Jetzt kostenfreien Video-Call buchen


Low Cost Automation Shop
Kostengünstige Robotik für Ihr Automatisierungsvorhaben
Den passenden Roboter für Ihre individuelle Anwendung finden Sie in unserem Online-Shop.Stöbern, informieren und unkompliziert bestellen.
Zum Shop
